





Pesquisadores da Universidade da Pensilvânia e da Universidade de Michigan criaram os menores robôs autônomos totalmente programáveis já concebidos. Essas máquinas microscópicas podem nadar através de líquidos, perceber o ambiente ao seu redor, responder de forma independente, operar por meses a fio e custar cerca de um centavo cada para serem produzidas.
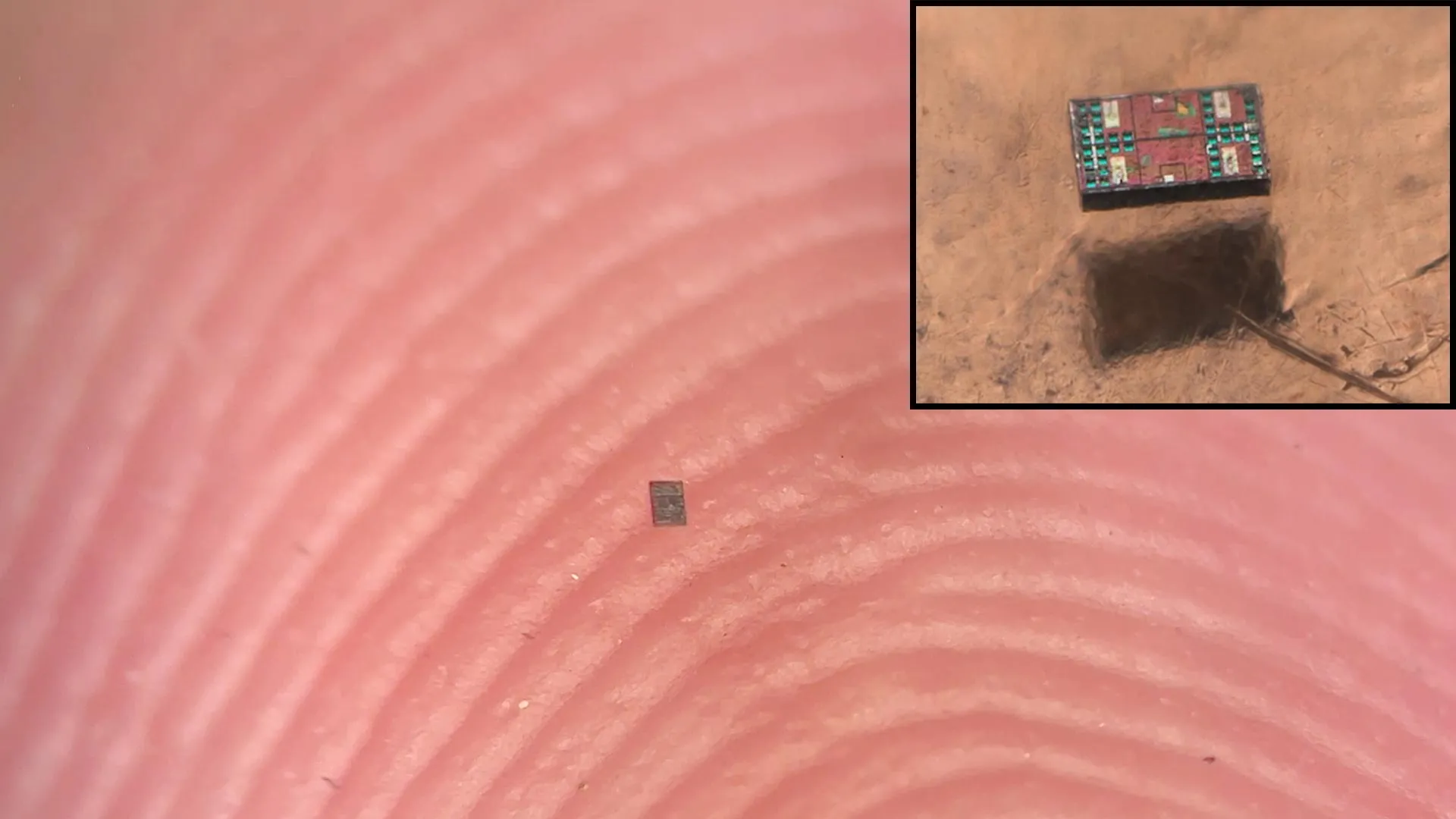
Cada robô é quase invisível sem ampliação, medindo aproximadamente 200 por 300 por 50 micrômetros. Isso os torna menores do que um grão de sal. Como funcionam na mesma escala de muitos microrganismos vivos, esses robôs poderiam, um dia, ajudar médicos a monitorar células individuais ou auxiliar engenheiros na montagem de dispositivos minúsculos usados na fabricação avançada.
Movidos inteiramente por luz, os robôs contêm computadores microscópicos que permitem seguir caminhos programados, detectar variações de temperatura local e ajustar seu movimento em resposta.
O trabalho foi reportado nas revistas Science Robotics e Proceedings of the National Academy of Sciences (PNAS). Ao contrário de máquinas minúsculas anteriores, esses robôs não dependem de fios, campos magnéticos ou controles externos. Isso os torna os primeiros robôs verdadeiramente autônomos e programáveis em uma escala tão pequena.
“Nós fizemos robôs autônomos 10.000 vezes menores,” diz Marc Miskin, professor assistente de Engenharia Elétrica e de Sistemas na Penn Engineering e autor sênior dos artigos. “Isso abre uma nova escala inteiramente nova para robôs programáveis.”
Por que encurtar robôs tem sido tão difícil
A eletrônica tem se tornado progressivamente menor nas últimas décadas, mas a robótica não seguiu a mesma trajetória. De acordo com Miskin, a independência em tamanhos abaixo de um milímetro continua sendo um desafio não resolvido. “Construir robôs que operem independentemente em tamanhos abaixo de um milímetro é extremamente difícil,” afirma. “O campo ficou essencialmente preso nesse problema por 40 anos.”
Em escalas diárias, o movimento é moldado por forças como gravidade e inércia, que dependem do volume de um objeto. Em tamanhos microscópicos, no entanto, as forças relacionadas à superfície dominam. O arrasto e a viscosidade se tornam esmagadores, mudando dramaticamente como o movimento funciona. “Se você é pequeno o suficiente, empurrar a água é como empurrar através de alcatrão,” explica Miskin.
Por causa dessa mudança nas leis da física, os designs robóticos convencionais falham. Braços ou pernas pequenos tendem a quebrar facilmente e são extremamente difíceis de fabricá-los. “Pernas e braços muito pequenos são fáceis de quebrar,” explica Miskin. “Eles também são muito difíceis de construir.”
Para superar essas limitações, os pesquisadores desenvolveram uma nova forma de movimento para os robôs que trabalha com a física do mundo microscópico em vez de lutar contra ela.
Como robôs microscópicos nadam
Peixes e outros nadadores grandes se movem empurrando a água para trás, gerando movimento para frente através da Terceira Lei de Newton. Os robôs minúsculos adotam uma abordagem muito diferente.
Em vez de se dobrar ou flexionar, os robôs geram um campo elétrico que empurra suavemente partículas carregadas no líquido ao seu redor. À medida que esses íons se movem, eles arrastam moléculas de água próximas com eles, criando efetivamente movimento no fluido ao redor do robô. “É como se o robô estivesse em um rio em movimento,” diz Miskin, “mas o robô também está causando o movimento do rio.”
Ajustando esse campo elétrico, os robôs podem mudar de direção, seguir caminhos complexos e até coordenar seus movimentos em grupos que se assemelham a cardumes de peixes. Eles podem alcançar velocidades de até um comprimento de corpo por segundo.
Por meio desse método de natação que utiliza eletrodos sem partes móveis, os robôs são notavelmente duráveis. Segundo Miskin, eles podem ser transferidos entre amostras repetidamente com uma micropipeta sem danos. Alimentados por luz de um LED, os robôs conseguem continuar nadando por meses.
Empacotando inteligência em um corpo microscópico
A verdadeira autonomia requer mais do que movimento. Um robô também deve ser capaz de perceber seu ambiente, tomar decisões e se alimentar de energia. Todos esses componentes precisam caber em um chip que mede apenas uma fração de milímetro. Esse desafio foi abordado pela equipe de David Blaauw na Universidade de Michigan.
O laboratório de Blaauw já detém o recorde de criar o menor computador do mundo. Quando Blaauw e Miskin se conheceram em uma apresentação da Defense Advanced Research Projects Agency (DARPA) há cinco anos, perceberam rapidamente que suas tecnologias se complementavam. “Vimos que o sistema de propulsão da Penn Engineering e nossos pequenos computadores eletrônicos estavam feitos um para o outro,” diz Blaauw. Mesmo assim, transformar essa ideia em um robô funcional exigiu cinco anos de desenvolvimento.
Um dos maiores obstáculos foi a energia. “O desafio principal para a eletrônica,” diz Blaauw, “é que os painéis solares são minúsculos e produzem apenas 75 nanowatts de potência. Isso é mais de 100.000 vezes menos potência do que um smartwatch consome.” Para fazer o sistema funcionar, a equipe projetou circuitos especializados que operam em tensões extremamente baixas, reduzindo o consumo de energia em mais de 1000 vezes.
O espaço foi outra grande limitação. Os painéis solares ocupam a maior parte da superfície do robô, deixando muito pouco espaço para o hardware de computação. Para resolver isso, os pesquisadores redesenharam como o software do robô funciona. “Nós tivemos que repensar totalmente as instruções do programa de computador,” explica Blaauw, “condensando o que normalmente exigiria muitas instruções para controle de propulsão em uma única instrução especial para encolher o comprimento do programa e caber na memória minúscula do robô.”
Robôs que percebem e se comunicam
Esses avanços, juntos, resultaram no que os pesquisadores acreditam ser o primeiro robô sub-milimétrico capaz de tomada de decisão real. Ao que sabem, ninguém havia colocado um computador completo com processador, memória e sensores em um robô tão pequeno. Essa conquista permite que os robôs percebam seu ambiente e respondam de forma independente.
Os robôs incluem sensores eletrônicos de temperatura que podem detectar mudanças tão pequenas quanto um terço de grau Celsius. Essa capacidade permite que se movam em direção a regiões mais quentes ou relatem valores de temperatura que podem servir como indicadores de atividade celular, oferecendo uma forma de monitorar células individuais.
A comunicação dessas medições exigiu uma solução inventiva. “Para reportar suas medições de temperatura, projetamos uma instrução de computador especial que codifica um valor, como a temperatura medida, nas oscilações de uma pequena dança que o robô executa,” diz Blaauw. “Então, observamos essa dança através de um microscópio com uma câmera e decodificamos das oscilações o que os robôs estão nos dizendo. É muito semelhante a como as abelhas comunicam-se entre si.”
A mesma luz que alimenta os robôs também é utilizada para programá-los. Cada robô possui um endereço único, permitindo que os pesquisadores carreguem diferentes instruções para diferentes unidades. “Isso abre um mundo de possibilidades,” acrescenta Blaauw, “com cada robô podendo potencialmente desempenhar um papel diferente em uma tarefa conjunta.”
Uma plataforma para futuras máquinas microscópicas
Os robôs atuais são apenas o ponto de partida. Versões futuras poderiam carregar programas mais avançados, mover-se mais rapidamente, incluir sensores adicionais ou funcionar em ambientes mais adversos. Os pesquisadores projetaram o sistema como uma plataforma flexível, combinando um método de propulsão robusto com eletrônica que pode ser fabricada de forma barata e adaptada ao longo do tempo.
“Isso é realmente apenas o primeiro capítulo,” diz Miskin. “Nós mostramos que você pode colocar um cérebro, um sensor e um motor em algo quase invisível e fazê-lo sobreviver e funcionar por meses. Uma vez que você tenha essa base, pode adicionar todos os tipos de inteligência e funcionalidade. Isso abre as portas para um futuro totalmente novo para a robótica em escala microscópica.”
A pesquisa foi conduzida na Escola de Engenharia e Ciências Aplicadas da Universidade da Pensilvânia (Penn), na Escola de Artes e Ciências da Penn e no Departamento de Engenharia Elétrica e Ciência da Computação da Universidade de Michigan. O financiamento veio da National Science Foundation (NSF 2221576), do Escritório do Presidente da Universidade da Pensilvânia, do Escritório de Pesquisa Científica da Força Aérea (AFOSR FA9550-21-1-0313), do Escritório de Pesquisa do Exército (ARO YIP W911NF-17-S-0002), da Fundação Packard, da Fundação Sloan e do Programa Nacional de Infraestrutura Coordenada em Nanotecnologia da NSF (NNCI-2025608), que apoia o Centro Singh para Nanotecnologia, junto com a Fujitsu Semiconductors.
Coautores adicionais incluem Maya M. Lassiter, Kyle Skelil, Lucas C. Hanson, Scott Shrager, William H. Reinhardt, Tarunyaa Sivakumar e Mark Yim da Universidade da Pensilvânia, e Dennis Sylvester, Li Xu e Jungho Lee da Universidade de Michigan.




